微纳光机电系统的仿生设计与制造方法
文章来源: 发布时间:2017-12-07
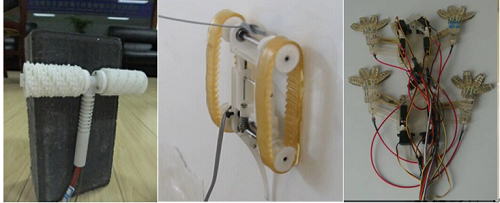
本项目来源于国家973计划。项目采用分子动力学模拟方法为具有降噪性能的微纳结构与器件的仿生设计提供了理论依据;严格导出了任意相互作用物体的变形方程和边界条件;利用飞秒激光双光子加工出单级纤维阵列,设计出带通滤波功能的亚波长光栅偏振器结构;完成了共4目68种昆虫的爬行攀附、足跗节形态学和昆虫足粘附原理研究;获得了大壁虎、树蛙等典型四足爬行动物爬行时与壁面接触反力模型,初步了解了大壁虎CPG神经网络传导机理;建立了大壁虎脚趾刚毛方向性粘附耦合模型,优化了3种履带式爬行机器人和钩刺式爬行机器人原理样机设计,实现了任意角度壁面粘附爬行,此项目代表国际机器人发展的先进水平。