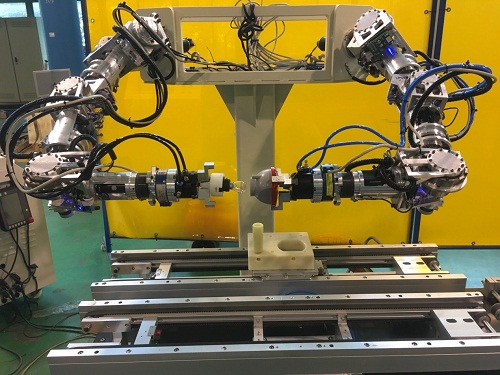
本项目来源于江苏省重大科技支撑计划。项目拟攻克机电一体化关节、欠驱动手爪、高强度轻量化设计、精密制造工艺、多传感器信息融合、目标识别与精确定位、多任务运动规划与智能决策、双臂协调控制等关键技术,研制出多功能冗余自由度双臂协作工业机器人,进行双臂的协调操作和精细安装,可应用于航空航天、汽车电子、高端装备等领域的精密作业,为发展下一代工业机器人奠定基础。