Intelligent Pioneer Robot
|
DRC
Intelligent Pioneer Unmanned
网站地图
|
ENGLISH
首页
|
本所概况
所况介绍
现任领导
所长致辞
历任领导
兄弟单位
愿景使命
领导批示
大 事 记
|
机构设置
理 事 会
学术委员会
综合办公室
科研项目办公室
研究中心
|
平台建设
省市级平台
专业实验室
联合实验室
|
人才队伍
人才政策
研究人员
人事招聘
博 士 后
研究生培养
|
研究生培养
|
科研项目
在研项目
完成项目
成果转化
视频介绍
|
知识产权
授权专利
申请专利
发表论文
|
产品与服务
|
孵化企业
中科朗恩斯
中科科源
|
党群文化
领导关怀
党群组织
学习园地
创新文化
|
联系我们
常用线路
便民服务
关于我们
当前位置:
首页
>
科研项目
>
完成项目
科研项目
在研项目
完成项目
成果转化
视频介绍
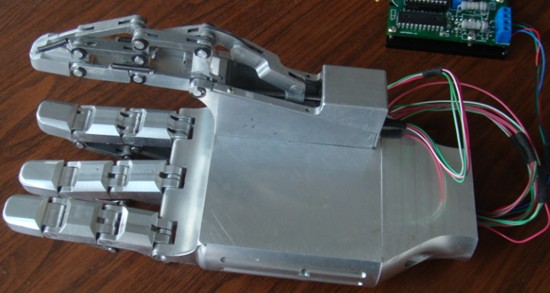
新型仿人手大负载多用途欠驱动手爪机构研究
文章来源: 发布时间:2010-07-31
本项目模仿人手适合抓取的生理结构,研制出一种能在仿人机器人上实际使用的大负载多用途欠驱动手爪,使得仿人机器人真正在实际中发挥作用。
[关闭窗口]